 St. Vinzenz-Krankenhaus Düsseldorf
St. Vinzenz-Krankenhaus DüsseldorfOP-PLANUNG

Beim Mako™-System handelt es sich um eine roboterarmassistierte Technologie, die OP-Planung und -Durchführung optimal aufeinander abstimmt. Bereits am Vorbereitungstag vor der Operation wird ein Computertomogramm des betroffenen Kniegelenkes angefertigt. Aus dieser Computertomografie wird zuerst ein 3D-Planungsmodell des Knies berechnet. Anhand dieser Daten wird die korrekte Größe des Kunstgelenkes ideal an den vorhandenen Knochen angepasst. Während der Operation wird zusätzlich in einer dynamischen Untersuchung die Bandspannung gemessen. Hierdurch wird die optimale Einpassung des Kunstgelenkes in den vorhandenen Knochen, Korrektur der Beinachse und beste Stabilität erreicht.
PRÄZISION UND SICHERHEIT WÄHREND DER OP
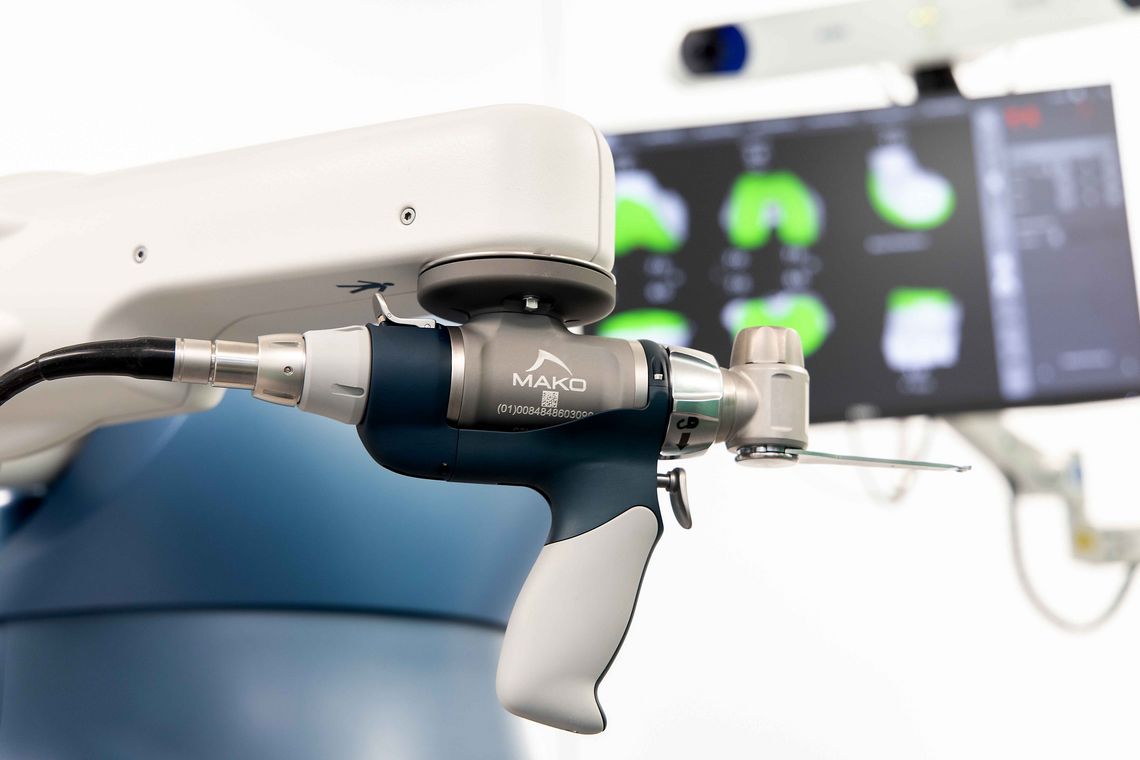
Das zentrale Element des Mako™-Systems ist ein „haptischer Roboterarm“, an dem eine Säge oder Fräse zur Bearbeitung des Knochens montiert ist. Der Roboter operiert jedoch nicht selbstständig – der Chirurg führt die Säge/Fräse selbst mit seinen Händen und besitzt jederzeit die Kontrolle über das Instrument.
Mit den vorab generierten Daten berechnet der Roboter die millimetergenau abgegrenzte Schnittfläche, auf der der Operateur die Säge/Fräse aktivieren kann. Der Roboterarm lässt Bewegungen außerhalb der definierten Schnittfläche nicht zu. Die umgebenden Strukturen, wie Nerven, Gefäße oder Bänder werden so durch den Roboterarm effektiv geschützt. Anschließend trägt der Operateur den definierten Knochen der Schnittflächen mit dem am Roboterarm befestigten Instrument millimetergenau ab, ohne Weichteilstrukturen zu gefährden. Durch diese einzigartige, hoch präzise Sägeführung kann die 3D-Planung somit in der Operation unter Verbesserung der Patientensicherheit akkurat umgesetzt werden.
VORTEILE FÜR DEN PATIENTEN
Durch die Kombination aus erfahrenem Operateur und moderner Technik wird nicht nur die Patientensicherheit, sondern auch die Ergebnisqualität verbessert. Die so präzise abgestimmte Prothesenimplantation sorgt für eine ausgezeichnete Beweglichkeit und Gelenkstabilität, eine lange Haltbarkeit, verringerte Restbeschwerden und das bei weniger Komplikationen (Gefäß-/Band-/Nervenverletzungen) durch verbesserten Weichteilschutz.
Das Ziel der Roboterassistenz ist es in erster Linie, zu jeder Zeit eine Operation für den Patienten auf höchstmöglichem Qualitäts- und Sicherheitsniveau durchzuführen, um optimale Funktionalität, Stabilität und Prothesenhaltbarkeit zu erreichen.
Die Gründe dieses minimierten Risikos sind:
hochpräzise Implantatplanung, die das Bemessen einer exakten Prothesengröße ermöglicht
hochpräzise Knochenschnitte durch eine Roboterarm-assistierte Geräteführung